
Mariene robotica-experten van het VLIZ (Fred Fourie, Kobus Langedock en Roeland Develter) en de crew van de RV Belgica bereiden de AUV Barabas voor op een duik in het Gollum-kanaalsysteem.
Afgelopen zomer voeren geologen van de Universiteit Gent samen met mariene robotica-experten van het VLIZ met het onderzoeksschip Belgica naar de Atlantische Oceaan ten zuidwesten van Ierland. Ze namen er onder leiding van Prof. dr. David Van Rooij (Universiteit Gent) onder andere het Gollum-kanaalsysteem onder de loep dat verantwoordelijk is voor de aanvoer van sediment van het ondiepe continentaal plat naar de diepzee. Een belangrijke rol in dit onderzoek was weggelegd voor de autonome onderwaterrobot (AUV) Barabas van het VLIZ Marine Robotics Centre. De AUV legde tijdens deze campagne meer dan 200 km af onder water, bereikte een recorddiepte van 1000 meter en bracht onverwacht een scheepswrak in beeld. Via Testerep magazine herbeleef je de missie vanop de eerste rij.
Een zee zo vlak als een spiegel, een stralende zon en een licht briesje. 11 augustus 2022 kondigde zich aan als de perfect dag voor een duik met de onderwaterrobot AUV Barabas. Op dat moment hadden Fred Fourie, Kobus Langedock en Roeland Develter – experten in onderwaterrobotica van het Vlaams Instituut voor de Zee (VLIZ) – nog geen flauw idee wat ze later die dag zouden ontdekken.
Een duik in het diepe
Na een wekenlange voorbereiding en een finale controle aan boord, lieten ze de robot te water. Onder hen de gapende diepte van de Gollum-kanalen die de ondiepe zeebodem voor het Ierse vasteland verbindt met de diepzee. “We startten in het ondiepe deel van het kanaalsysteem en navigeerden de robot geleidelijk aan naar grotere diepte. Doordat de waterdruk stijgt met toenemende diepte, heeft elk onderwatertoestel een maximumdiepte tot waar het kan duiken. Voor de AUV Barabas is deze begrensd op 1000 meter,” licht Fred toe. “Vergelijkbare toestellen hebben veelal een maximumdiepte van 100 à 300 meter. De AUV Barabas is met zijn duikdiepte tot 1000 meter dan ook eerder zeldzaam in zijn klasse.” “Speciaal aan deze AUV is bovendien dat hij modulair is en wordt opgebouwd uit verschillende modules met meetappararuur die we kunnen toevoegen of weglaten naargelang de onderzoeksvragen die de wetenschappers willen beantwoorden,” vult Kobus aan.
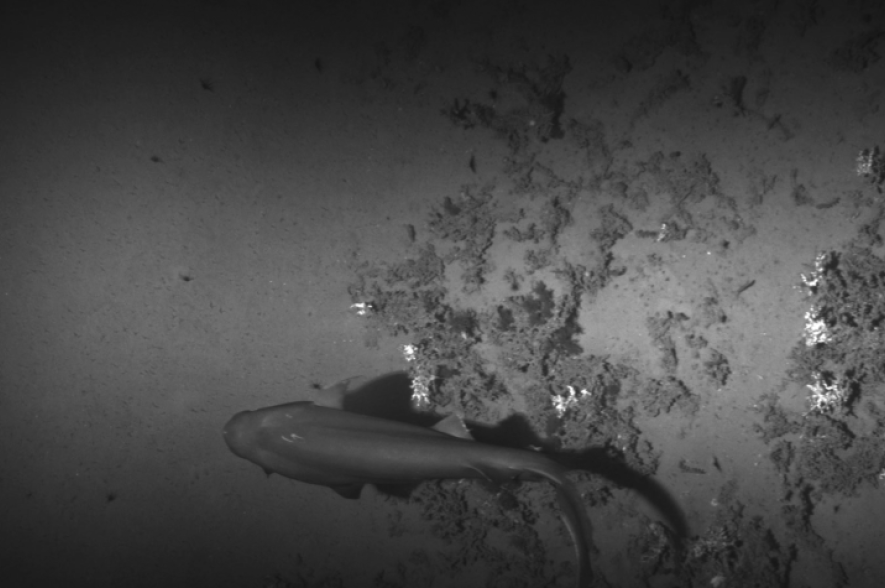
Een vermoedelijke grauwe haai (Hexanchus griseus) in beeld gebracht door de AUV Barabas op een diepte van 950 meter op de Atlantische continentale helling in de Porcupine Seabight.
Het was voor het AUV-team de eerste keer dat ze de door de fabrikant ingestelde limietdiepte bereikten. En het bleek geen sinecure om dit te verwezenlijken. “Het meest uitdagende deel van de missie is om de correcte positie te kennen van het toestel onderwater,” vertelt Kobus. “Terwijl de AUV duikt kan hij geen beroep doen op zijn GPS-systeem; die werkt niet onder water. In ondiep water, waar het toestel de zeebodem de hele tijd kan detecteren, is het voldoende dat het toestel vertrouwt op zijn startlocatie. Maar in water dieper dan pakweg 70 meter opereert het toestel ‘blind’ tot hij de zeebodem bereikt en moeten wij als piloten op geregelde tijdstippen via geluidsignalen doorgeven waar het zich bevindt. Omgekeerd stuurt het toestel ons ook af en toe geluidssignalen met info over zijn locatie.” Het team slaagde in zijn opzet en kon beelden en metingen verzamelen in de Gollum-kanalen tot een diepte van maar liefst 1000 meter. Een record voor AUV Barabas en een bekroning voor het harde werk van het VLIZ Marine Robotics team in de voorbije jaren.
Een onverwachte ontmoeting
Eenmaal de AUV terug aan het wateroppervlak, recupereren Fred, Kobus en Roeland de verzamelde data en bekijken ze de camera- en sonarbeelden om objecten op de zeebodem te identificeren. Ook voor hun recordduik was dat niet anders. Maar dit keer viel hen iets speciaal op. Een van de gedetecteerde objecten op het pad van de AUV zag er onnatuurlijk uit qua vorm, afmetingen en schaduw. Voor een leek moeilijk waar te nemen, maar het getrainde oog van Kobus viel het meteen op. Dit object wilden ze wel eens van naderbij bekijken, waartoe het team besloot om de tests in de aanloop naar de volgende duik over het object te laten plaatsvinden. Nadere inspectie toonde dat het object inderdaad geen natuurlijke oorsprong had, maar een scheepswrak was. “De AUV nam beelden van het schip waarop het IMO-nummer (red. het scheepsidentificatienummer) te zien was. Op basis van dit nummer konden we het schip identificeren,” licht Kobus toe.
Het bleek om het vissersvaartuig Piedras te gaan. Volgens ‘The Fishing Daily’ werd het schip op woensdag 1 juni 2022 in moeilijkheden gemeld, ongeveer 60 zeemijl ten zuidwesten van Mizen Head, Cork (Ierland). De 11-koppige bemanning verliet het vaartuig en kon worden opgepikt door een nabijgelegen vissersvaartuig. De Piedras zou in brand hebben gestaan toen de Ierse kustwacht ter plaatse kwam. Enkele uren later zonk het schip. “Deze vondst toont dat de onderwaterrobot niet enkel van goudwaarde is voor wetenschappelijk onderzoek, maar dat het toestel ook perfect inzetbaar is voor zoek- en reddingsacties,” besluit Kobus. Tot slot, rapporteerde de campagneleiding de vondst formeel aan de Ierse autoriteiten en dankzij AUV Barabas werd de exacte locatie van het wrak van de Piedras opgenomen in de officiële wrakkendatabank van Ierland.
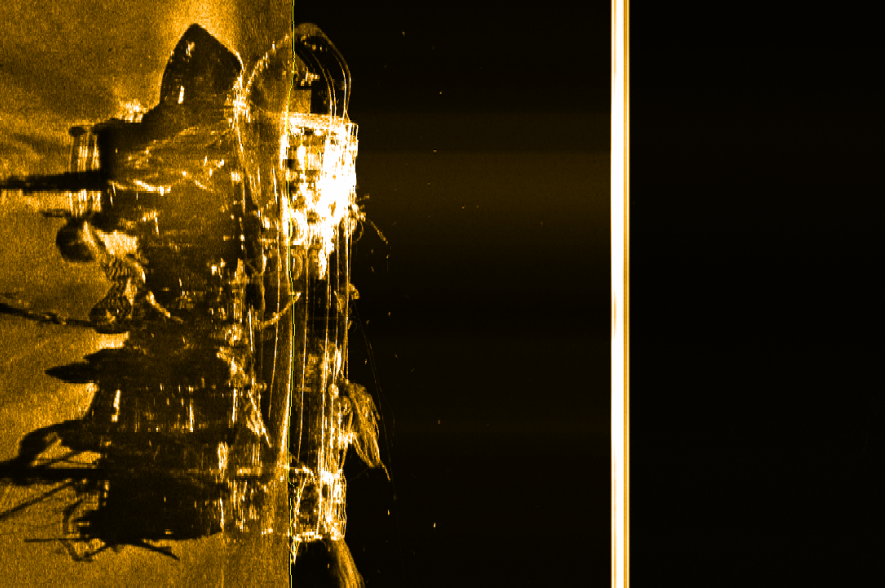
Een sidescan sonar opname van het vissersvaartuig Piedras tijdens een duik met de AUV Barabas.
De AUV-duiken werden uitgevoerd door het VLIZ Marine Robotics Centre in het kader van het FWO-project DynaMOD en het FWO-aspirant mandaat van Lotte Verweirder, onder leiding van Prof. dr. David Van Rooij (Renard Centre of Marine Geology, Vakgroep Geologie, Universiteit Gent), vanop het onderzoeksschip RV Belgica (OD Natuur, KBIN). Het DynaMOD project voert onderzoek naar veranderingen in intensiteit van bodemstromingen in de aanwezigheid van een zeebodem met een complexe topografie langs de oostelijke helling van de Porcupine Seabight (Belgica Mound Province). Het FWO-aspirant mandaat van Lotte Verweirder onderzoekt de sedimentaire processen binnen de Gollum kanalen.